10toGO: Virtual thinkathon for Sustainable Development Goals Or: what we do when we don't do science.
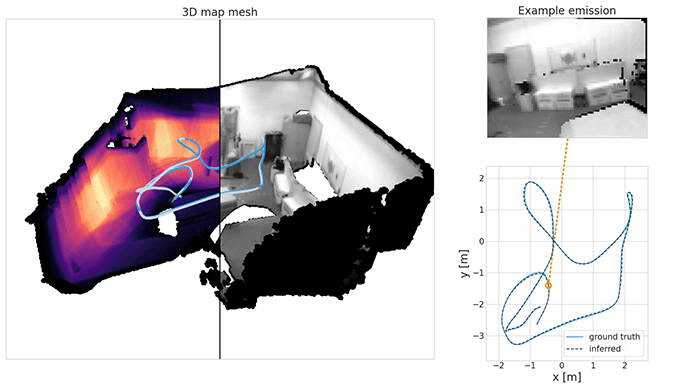
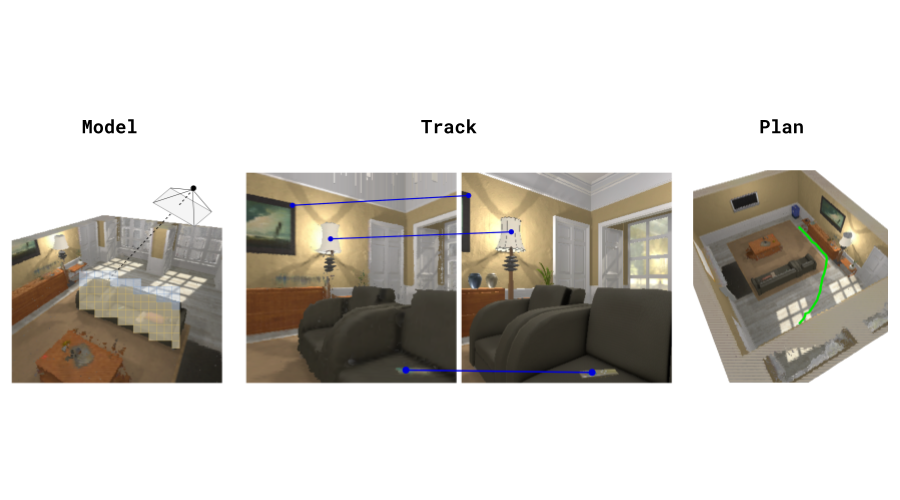
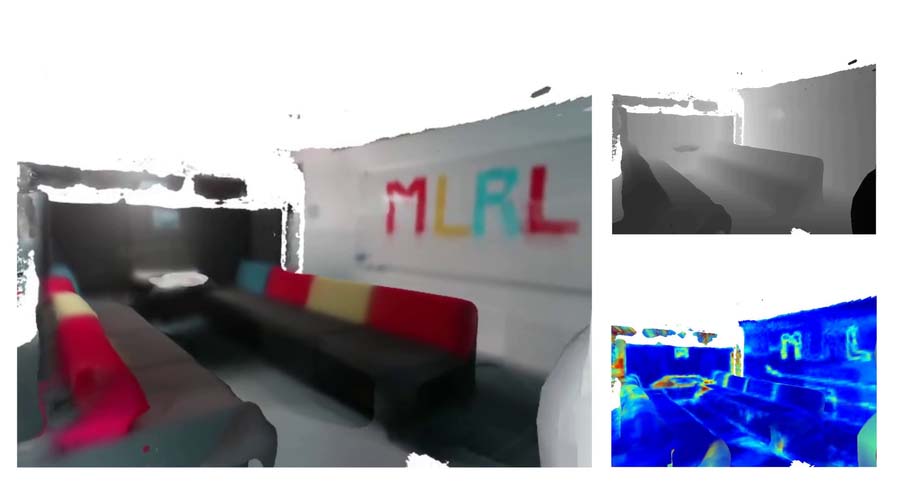
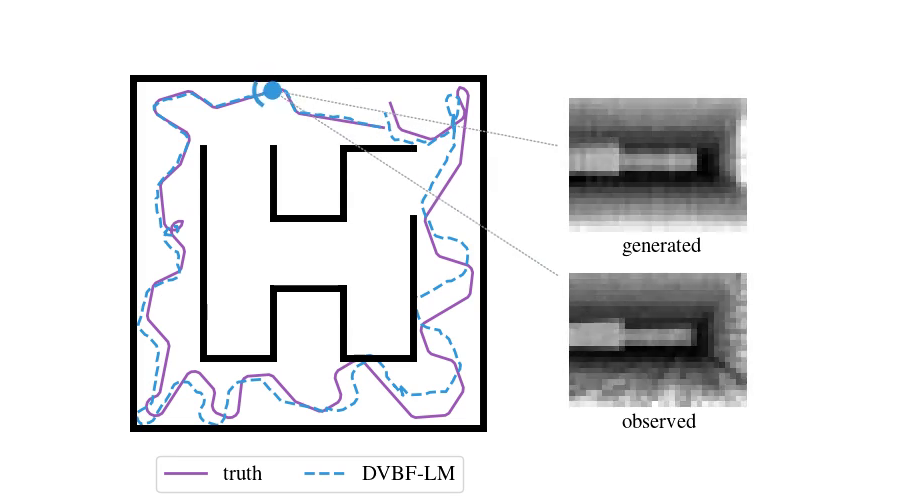
Variational State-Space Models for Localisation and Dense 3D Mapping in 6 DoF Scaling generative spatial models to the real world
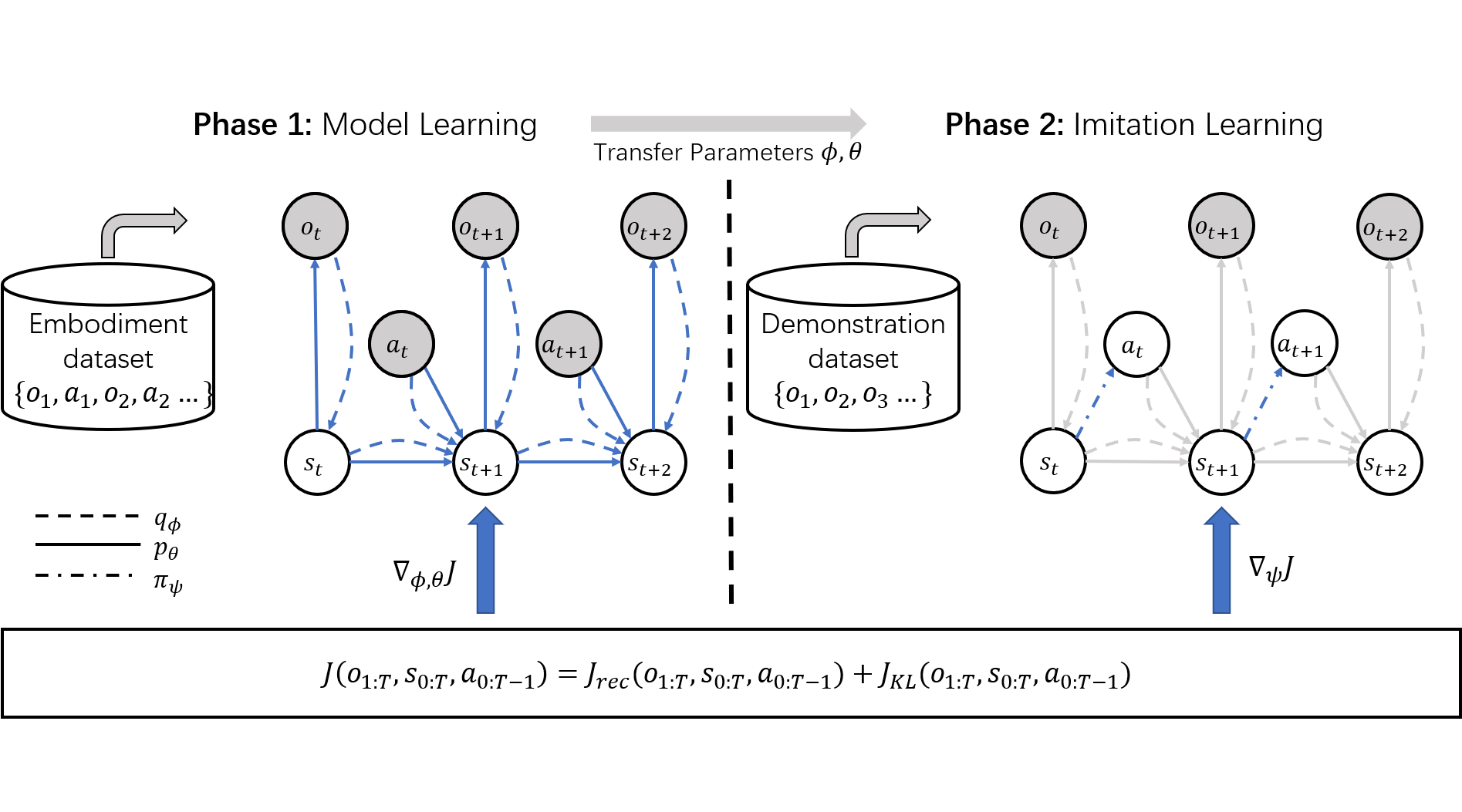
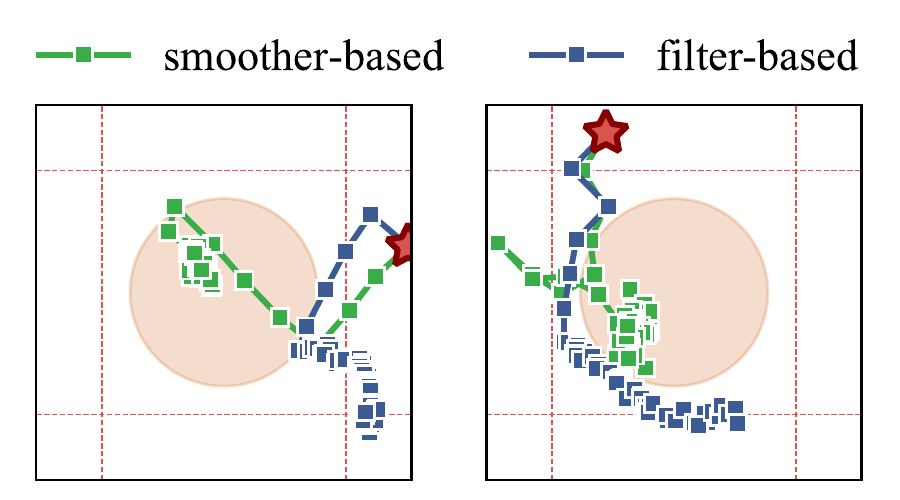
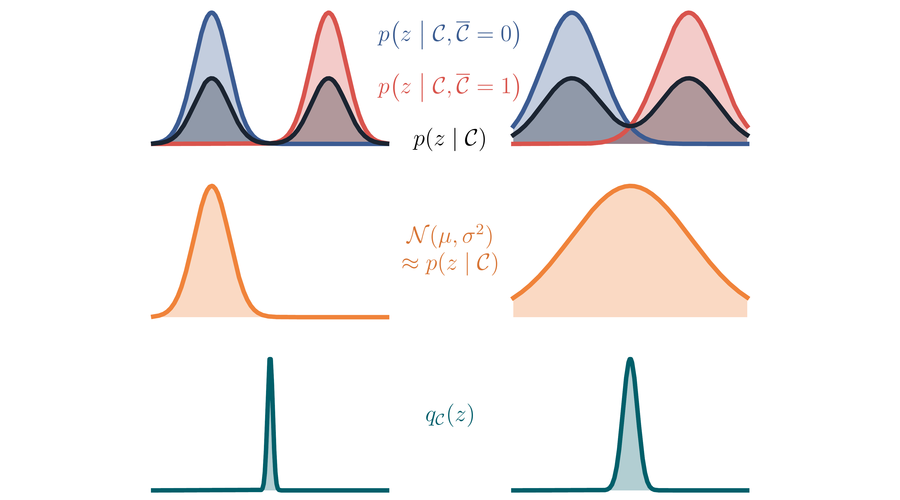
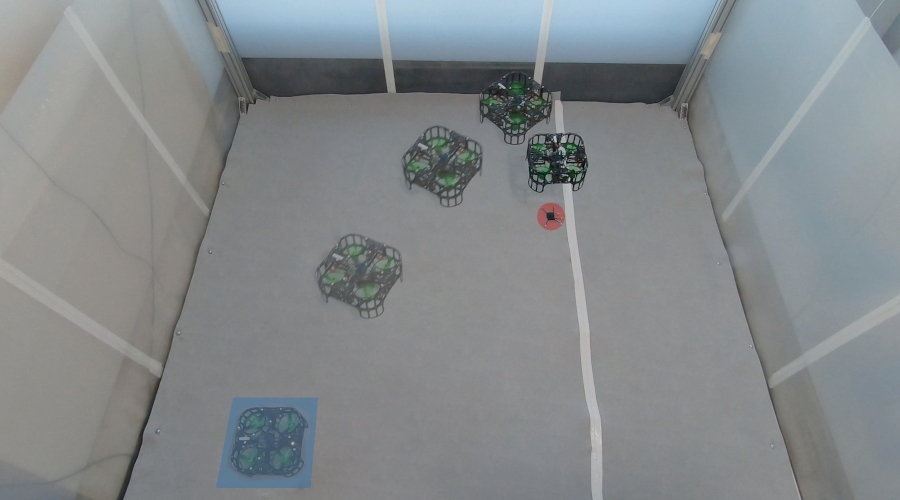
Less Suboptimal Learning and Control in Variational POMPDs How to fix model-based RL by doing the obvious.
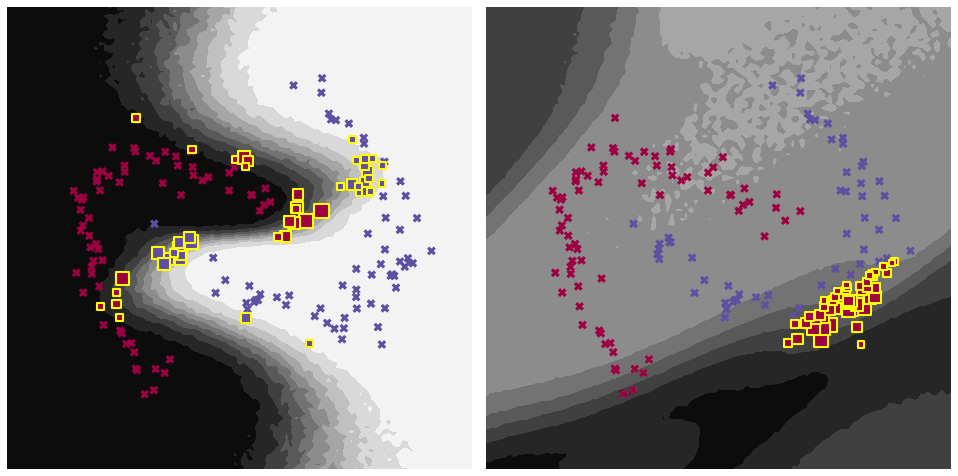
Continual Learning with Bayesian Neural Networks for Non-Stationary Data Adapting to changing environments
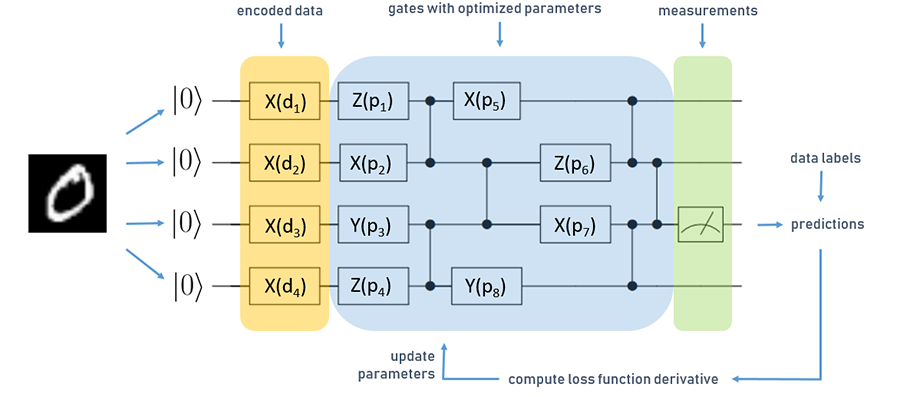
Layerwise learning for quantum neural networks Solving vanishing gradients in quantum neural networks
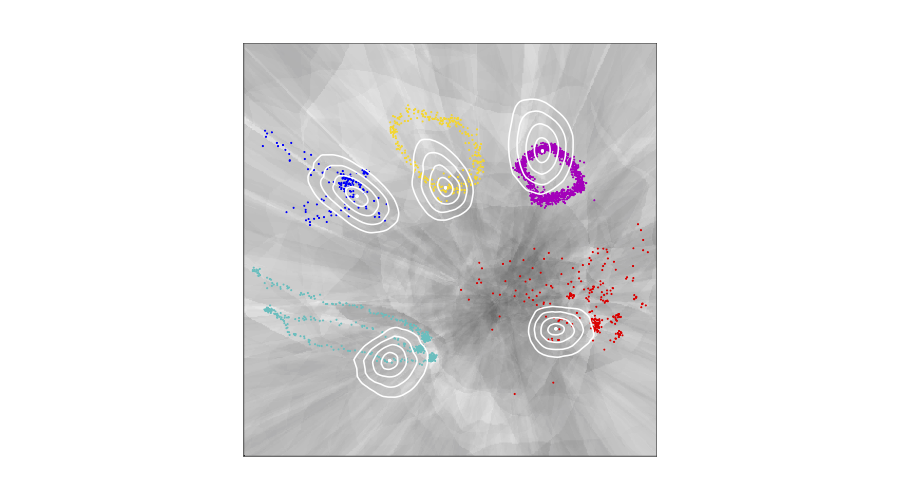
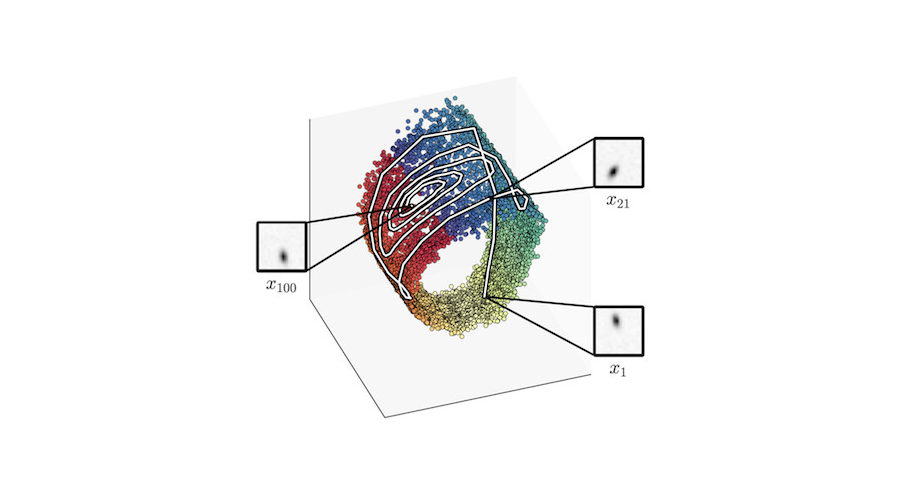
Approximate Geodesics for Deep Generative Models How to efficiently find the shortest path in latent space